
Torsional Rectilinear Plant Apparatus Model MT 151
Torsional Rectilinear Plant Apparatus Model MT 151
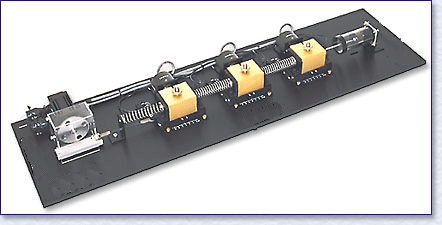
Sci-tech Rectilinear Plant Apparatus Model MT 151 is used to explain and experiment on the behavior of mass-spring-damper systems. The drive motor enables investigation of forced responses, while the three masses, three springs and single damper can be arranged in a variety of formations. Encoders linked to the masses communicate the three mass positions to the computer for analysis. The mechanism features adjustable masses, interchangeable springs and adjustable air damping. The system provides vivid demonstrations of elementary topics such as rigid body PID control, lead/lag compensators, phase and gain margin, trajectory tracking, and regulation – as well as advanced high order collocated and non-collocated system control.
| Size: | 120cm x 50cm x 50cm (LxWxH) |
| Weight: | 45 kg |
Item Description
Sci-tech Rectilinear Plant Apparatus Model MT 151 is used to explain and experiment on the behavior of mass-spring-damper systems. The drive motor enables investigation of forced responses, while the three masses, three springs and single damper can be arranged in a variety of formations. Encoders linked to the masses communicate the three mass positions to the computer for analysis.
The mechanism features adjustable masses, interchangeable springs and adjustable air damping.
The system provides vivid demonstrations of elementary topics such as rigid body PID control, lead/lag compensators, phase and gain margin, trajectory tracking, and regulation – as well as advanced high order collocated and non-collocated system control.
See also different:
Sci-tech Orifice Discharge Apparatus Model FM 04 has been designed to enable students to determine the co-efficient of discharge of sharp edged orifice and nozzles. It consists of a vertically mounted cylindrical transparent plastic water tank [...]

- Electrical system to demonstrate the live operation and study of instrument panel system. - The trainer consists of instructional materials and diagnostic equipment to be used by students and instructors.

Sci-tech PC Operated Temperature Control System Trainer Model PCT 106 is designed to demonstrate various aspects of control engineering using a temperature controlled system. Electrical oven or hot water bath is used as process. Temperature of [...]